

AUTOMATED DRAGLINES MOVE ONE STEP CLOSER TO REALITY
Global mining technology leader MineWare is collaborating with CRCMining and the University of Queensland on an 18-month ACARP (the Australian black coal industry’s research program) project set to advance drag-line operations one step closer to automation.
Funded by an ACARP grant of more than $600,000 — as well as in-kind support from MineWare and CRCMining — the joint R&D project focuses on developing and implementing a new dig sequencing technology that aims to identify the best sequence of operations and movements for a dragline to excavate in the most efficient and productive way.
The technology will give operators instantaneous position, digging and dumping guidance, supporting them to make critical decisions around the sequencing of excavation.
MineWare CEO and Project Co-leader Andrew Jessett said that dragline operations will benefit from a significant improvement in productivity.
“On draglines around the world, we continue to see inconsistencies in operator sequences and techniques, which can result in variations in productivity rates in excess of 10%,” Jessett said. “By giving dragline operators accurate, instant guidance, we want to close the gap on these variations and improve productivity as a direct result.”
Jessett believes the time is right for the industry to revisit the historic problem of dragline automation, capitalizing on the readiness of new and emerging technologies. He said the project represents a logical stepping stone toward the realization of an automated dragline system — one that can bring an immediate benefit to the open-cut mining industry globally.
“This project builds upon more than 20 years of initiatives aimed at improving the performance of draglines,” Jessett said.
“While the dream of an automated dragline system is still many, many years away, we’re ready to take another big step, harnessing new digital terrain mapping technology and our Pegasys Dragline Production Monitor to semi-automate key dragline dumping and positioning functions.”
Forming part of a broader road map toward improving dragline performance through automation [see Figure 1], the project is split into two major stages.
Stage one involves the design of a dragline excavation sequencing system, underpinned by a sophisticated algorithmic approach relevant to all dragline operations worldwide.
Stage two will trial the algorithm on a fully operational production dragline, integrated into MineWare’s Pegasys dragline monitoring system. During this stage, operator visualization and supervisor report tools will be developed to analyze operator-based sequencing of excavation against the sequencing algorithm.
The project’s immediate benefit to industry will be the development of the operator assistance technology targeting four key areas — minimizing average cycle and positioning time while digging; increasing compliance to final pit geometry; reducing rework and rehandling of material; and pre-warning against potential pit issues such as spoil bound scenarios.
A further future benefit will be the development of automation technologies that build naturally on the excavation sequencing information provided by the operator assistance technology.
Additional benefits for mining companies include an increase in coal uncover rates; improved safety by avoiding leaving high/low walls in danger of slumping and reducing the need for surveyors in the pit; increased operational reliability and consistency, and lower duty cycling.
Clarifying the role and importance of dig sequence technology in dragline automation, Jessett said that correct operator decision-making is one of the most critical influencers of dragline performance. “There is a direct link between operator performance and dragline productivity, particularly when it comes to excavation planning,” Jessett said. “Only the very best dragline operators are well skilled in this area; they need to know when to reposition a dragline, what the optimal sequence of moves is to dig a block and how the dragline should move to get there.”
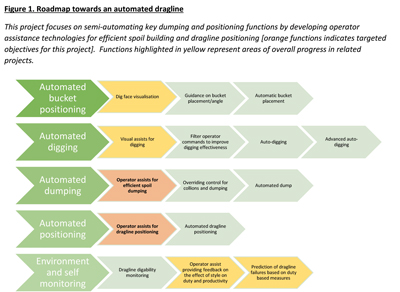 |
| Figure 1: Road map toward an automated dragline. |
“The answers to these questions lie at the very heart of dragline efficiency and productivity. By creating a system that allows us to get dig sequencing right every time, we will have made a significant step forward toward automation.”
Attracting widespread support and interest from mining industry leaders and original equipment manufacturers (OEMs), the project builds upon the work of several previous ACARP projects and research undertaken by CRCMining on tactical mission-planning for mining excavators.
ACARP’s Open Cut Committee has appointed senior representatives from four of the world’s largest coal mining companies as “industry monitors” for the project. The success of the project will be judged on the physical uptake of automation technologies across mine sites as project partners use research outcomes for commercial development on draglines worldwide.
Looking ahead, Jessett said that the natural extension of this project is for the optimal sequencing information to build on previous research on swing automation systems that, in the first instance, automate the swing, dump and return motions of the dragline.
“By combining optimal sequencing and automated motion, we can deliver key improvements to machine productivity in two major areas,” Jessett said.
“Firstly, we’ll be able to deliver production rates that match best practice in manual operation; and secondly, we will reduce maintenance downtime by ensuring smooth control actions.”

